
A new generation of research started by the Bartlett School of architecture’s layout computation laboratory looks into robotically built furniture, a procedure which is basically lego-like building blocks which may be configured to complex forms. The study, titled Mickey Topics has been conducted in cooperation with the ‘architectural design mArch’ program at the institution, focusing on the development of highly cost-effective manufacturing procedures.
Just like LEGOs, these standardized building blocks are always the same. As opposed to using the robot to craft a more complicated form with hundreds of unique components, the complexity here emerges from the combination of simple building blocks. These building blocks can be understood as ‘voxels’ or volumetric pixels — an electronic method that’s popular in computer visualizations for scientific analysis. It decreases the price, allows for different materials and at precisely the same time maintains a high level of formal sophistication. These properties open the chance for robotic manufacture to scale to an architectural scale.

A team of students from b-pro-research audience 4 initiated the job ‘mickey matter,’ study concentrated on the development of a highly cost-effective production method, utilizing a compression molding procedure. Custom aluminum molds in three distinct scales were designed and fabricated using CNC milling. These can subsequently be utilized to produce cheap, but exceptionally precise bits. The substance used is ABS pellets, but other materials such as plaster-composites and flexible plastics were also analyzed. The elements are designed in 2 parts, with a joint connection. This allows making the elements lightweight and hollow.

The spherical geometry decreases the demand for high-tolerance and accuracy in the assembly. The curved surface aids the elements to slip into place, which increased the rate. The elements can be picked up with a vacuum-suction gripper, then put into place.
The team developed a computational method based on combinatorics that is able to efficiently assemble these building blocks into complex, functional structures. The algorithm checks different mixtures of the elements but also defines link points and assists to research different layout possibilities. The building blocks are united with each other in various rotations, producing a variety of patterns. These can subsequently be evaluated concerning connection strength and autonomous fabrication limitations.

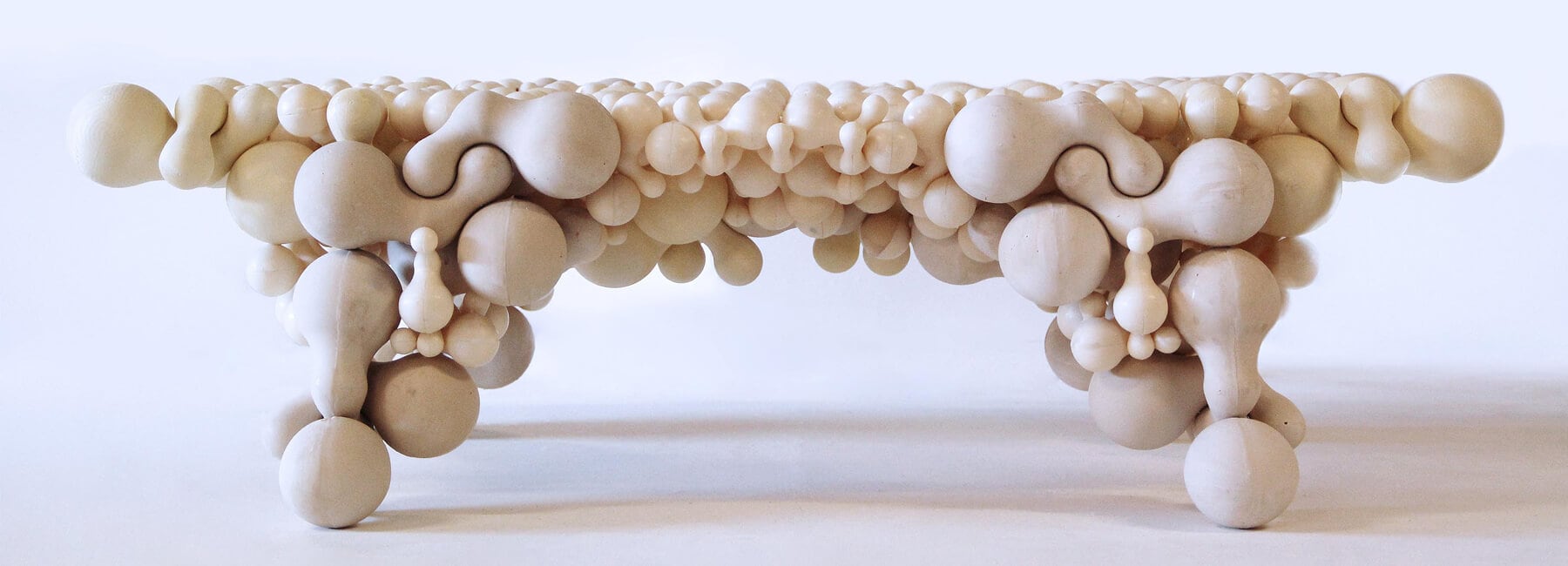
Subsequently, the data is sent into a robot for the meeting. To prototype the assembly process, two chairs and a table have been fabricated. These small-scale prototypes help to develop precise rules for larger-scale, architectural assemblies. The first chair and the table have been generated with a symmetrical bias. A limited amount of combinatorial patterns is utilized, resulting in an extremely controlled layout. The second chair explores a meeting with fewer constraints, leading to an asymmetric, less regulated form.
The architectural elements could be fabricated with an assortment of materials such as concrete, wood, plastics, etc..







